在安装舵机之前,记得先把舵机调整至初始位置,各个舵机都处于90°。
接线
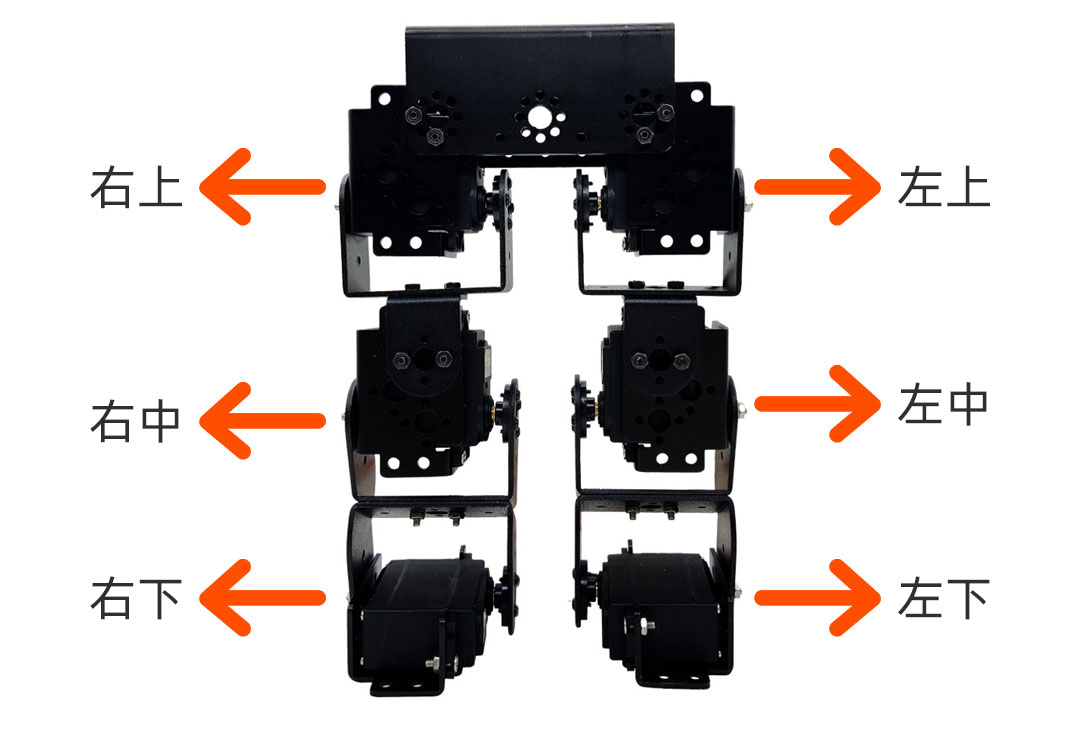
如图为搭建好的滑步机器人,一共用到了六个舵机,以上图为例,如下为接线方式:
左上——S1,左中——S2,左下——S3
右上——S4,右中——S5,右下——S6