姿态传感器接口(Python)
概要
小龟主控板自带了一枚六轴姿态传感器(三轴加速度 + 三轴陀螺仪)
所有姿态传感器的接口都位于car.motion下。
版本要求:不低于V211216
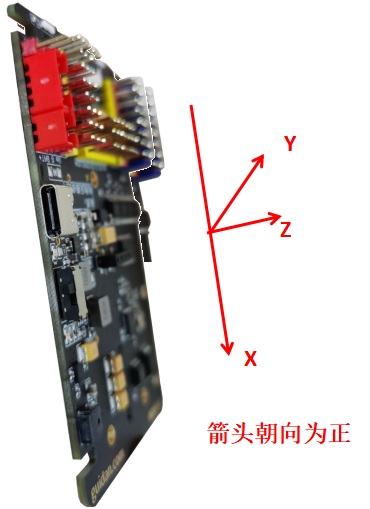
姿态传感器的坐标系示意图
读取三轴加速度计实时值
语法:
- car.motion.accel() -> [x, y, z]
说明:
读取三轴加速度计实时值。
参数:
- 返回值 x, y, z 三轴加速度的实时值,单位是g (1g = 1个地球重力加速度)
范例:
#读取三轴加速度计的实时值car.motion.accel()#(0.01, 0.01, 0.98111)
读取三轴陀螺仪实时值
语法:
- car.motion.gyro() -> [x, y, z]
说明:
读取三轴陀螺仪的实时值,单位是dps。
参数:
- 返回值 x, y, z 三轴陀螺仪的实时值
范例:
#读取三轴陀螺仪的实时值car.motion.gyro()
读取芯片温度
语法:
- car.motion.temp() -> float
说明:
读取姿态传感器芯片温度。如果芯片没有高负荷工作情况下,该温度可以拿来做环境温度。
参数:
- 返回值 芯片温度
范例:
#读取芯片温度car.motion.temp()